Diff accel что это
Assoluto Racing
Версия: 2.12.14
Жанр: Гонки
Последнее обновление игры в шапке: 22.04.2023









Краткое описание:
Автосимулятор от Infinity Vector Ltd
Описание:
ГОНКА ПОКОЛЕНИЙ
Assoluto Racing — следующее поколение в эволюции мобильных автосимуляторов.
РЕАЛЬНЫЕ АВТОМОБИЛИ
Гонка, с прекрасно воссозданными реально существующими автомобилями от ведущих производителей мира.
РЕАЛИСТИЧНАЯ ФИЗИКА
Наиболее реалистичный физический движок на мобильных платформах, даст вам непревзойденный контроль как на дороге, так и под капотом.
СДЕЛАНО С ЛЮБОВЬЮ
Наша маленькая инди команда гоночных энтузиастов с любовью создаёт самую реалистичную мобильную гоночную игру на рынке для вас.
(Вольный перевод на Русский via джон таннер)
Разработчик: Infinity Vector Ltd
Домашняя страница: www.assolutoracing.com
Особенности: 3D, Online
Русский интерфейс: Да
Системные требования: Android 9.0+ (старые версии 4.1+)
Использование модификаций игры пользователи осуществляют на свой страх и риск. Жалобы, связанные с работоспособностью игры после применения модификаций, рассматриваться не будут.
1.measuring vibration (vibration measurement)
The autonomous driving instrument has an acceleration of vibration sensitivity. These acceleration values are fused with the air pressure meter and GPS data to estimate the location of the vehicle. If the vibration is too large, the estimated value may be ignored and leads to the performance of the performance of the performance (for example, on the Copter: Althold, Loiter, RTL, Guided, POSITION, and Auto Flight).
These descriptions explain how to measure the level of vibration. If you find that they exceed the tolerance range, follow the suggestions on the vibration reduction pageVibration reduction。
2.Real-time view in group station (real-time view of the ground station)
The ground station can show the real -time view of vibration and collision. If you use the Mission Planner ground station, click "VIBE" on HUD to display the current vibration level.

The vibration level is usually acceptable than 30m/s/s. There may be problems with heights higher than 30m/s/s, and heights higher than 60m/s/s almost always have positions or height maintenance problems。
The parameters given here are less than 3G, and it is unacceptable than 6G.
3. VIBE DataFlash Log Message
Most of the vibration levels of inspection records are lower than 30m/s/s
- Routine flights that perform at least a few minutes (that is, not just hovering gently) and download the DataFlash logLog download。
- Use the Mission Planner or other ground stations to display the VIBEX, VIBEY and VIBEZ values of VIBE messages. These show the standard deviation of the main acceleration output, the unit is M/S/S. The image below is taken from a 3DR IRIS, showing that the normal level is lower than 15m/s/s, but occasionally the peak value is 30m/s/s. The maximum acceptable value seems to be less than 30m/s/s (see Figure 2 below).

- Draw a CLIP0, CLIP1, and CLIP2 values that increase each acceleration at each acceleration to its maximum limit (16G). Ideally, during the entire flight, these values should be zero, but lower values (<100) may be possible, especially during hard landing. The number of regular increases through logs indicates that there is a serious vibration problem and should be repaired.
This is an example of a vehicle that is estimated to be estimated due to high vibration.*
The algorithm used to calculate the vibration level can be seen in the CALC_VIBITION_AND_CLIPPING () method of AP_inertialSor.cppstandard deviation,As follows:
- Capture the original X, Y and Z acceleration value of the original X, Y and Z
- The original value of the Qualcomm filter at 5Hz is to remove the motion of the aircraft, and create a "Accel_vibe_floor" for X, Y and Z axis.
- Calculate the difference between the latest acceleration value and accel_vige_floor.
- The above differences, filter 2Hz, and then calculate the square root (x, y, and z). These last three values are VIBEX, Y and Z fields of VIBE MSG.
4.Looking for "The Leans" (looking for "tilt")
When the attitude of the leaning occurs in the aircraft is estimated to be incorrect, it has led to a significant tilt, even if the pilot is flying horizontally. The reason for the problem is usually the acceleration meter mixture, which can be confirmed by comparing the horizontal roll and pitch posture of each estimation system (that is, each AHRSS or EKFS). The gesture estimation value should be a few degrees.
- Download the DataFlash log and open it in the log viewer at the ground station
- Compare AHRS2.Roll, NKF1.Roll, NKF6.Roll

5.Advanced Analysis with FFT (FFT Advanced Analysis)
For a description of how to collect a large amount of IMU data and perform FFT analysis to determine the most frequency vibration frequency, please refer to the "Use IMU batch sampler measurement vibration" page.
6.imu dataflash log message (IMU data flash memory log message)
For the very old version of ArduPilot that does not include VIBE messages, you can directly check the IMU value.
Toyota о C.DIFF AUTO (перевод)

Неоднократно поступали пожелания узнать, что же написали японцы в книжке владельца о полном приводе и кнопке "C.DIFF AUTO" аж на целых двух страницах… Переводим выдержку из руководства для Corolla Spacio (1998)
FULLTIME 4WD
Машина с Fulltime 4WD, где усилие передается на все четыре колеса, демонстрирует эффект в следующих условиях движения:
Стабильность в движении и управляемость при повороте улучшаются.
Увеличивается предел стабильности и управляемости при движении по заснеженной или мокрой от дождя дороге, по рыхлому грунту и неровной дороге.
Fulltime 4WD не делает машину универсальной. Действуйте акселератором, рулем и тормозами с разумной осторожностью, всегда контролируя автомобиль.
О езде
Это легковой дорожный автомобиль. Запрещается бездумная езда.
Данная машина не предназначена для использования в офф-роуд и ралли. Соблюдайте следующие пункты:
Не ездите под водой, например при пересечении реки вброд.
На скользком покрытии ездите с осторожностью.
При вывешивании колес не газуйте бессмысленно.
О шинах
Поскольку на машине Fulltime 4WD усилие постоянно передается на четыре колеса, состояние шин оказывает существенное влияние на эффективность. Не забывайте проверять шины.
Каждые 5000 км меняйте шины местами. При наличии разного износа шин вы не получите максимальной эффективности.
Используйте четыре колеса правильной размерности, одного производителя, одного типоразмера, одной марки и одного рисунка протектора. При замене шины и диска проконсультируйтесь в магазине Toyota.
Периодически проверяйте давление в шинах. При значительной разнице в давлении между передними и задними колесами, вы не получите максимальной эффективности.
Устанавливайте цепи противоскольжения на передние колеса.
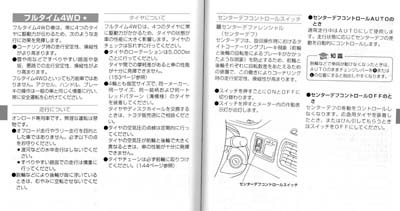
Переключатель управления межосевым дифференциалом.
Межосевой дифференциал предназначен для обеспечения разницы в частоте вращения передних и задних колес в повороте, во избежание принудительного торможения. Это улучшает стабильность и управляемость в повороте.
Выключатель переключается из ON в OFF нажатием.
Когда выключатель нажат, загорается индикатор на комбинации приборов.
Используйте при обычном движении положение AUTO. Управление дифференциалом осуществляется автоматически в зависимости от режимов движения.
Примечание. Если автомобиль застрял, то при положении переключателя AUTO переведите селектор АКПП в положения "L" или "R" для облегчения выезда.
Переключатель в OFF прекращает управление дифференциалом. Переключайте его в OFF при использовании докатки или при буксировке.
5.7: Differential basics
 The differential (or diff, for short) allows the left and right wheels to rotate independently, which helps balance the car through corners. Its configuration determines how much of the torque coming off the engine is transferred to each wheel. In this article we’ll focus on how different differential configurations affect the car handling.
The differential (or diff, for short) allows the left and right wheels to rotate independently, which helps balance the car through corners. Its configuration determines how much of the torque coming off the engine is transferred to each wheel. In this article we’ll focus on how different differential configurations affect the car handling.
If you’re interested in the mechanical workings of a differential, we recommend you check out the following videos: ‘How a Differential Works?’, ‘Understanding Limited Slip Differential’, and ‘Working of Limited Slip Differential’.
Locked differential (also known as a spool)
The spool is essentially a solid axle connection between the left and right wheels, or a fixed differential. Some people weld their differential fixed, for instance to allow easier drifting. A spool ensures both left and right tires rotate at exactly the same speed.
 A spool gives you good traction accelerating on a straight line, but the handling of the car is compromised during turning. When going around a corner, the outside tire has to travel a longer distance. So, the inside is forced to rotate faster than it needs for the turn radius and hence spins. This causes stress (wear) on both tires and the drive train. In terms of handling, this causes understeer when decelerating, and oversteer when accelerating.
A spool gives you good traction accelerating on a straight line, but the handling of the car is compromised during turning. When going around a corner, the outside tire has to travel a longer distance. So, the inside is forced to rotate faster than it needs for the turn radius and hence spins. This causes stress (wear) on both tires and the drive train. In terms of handling, this causes understeer when decelerating, and oversteer when accelerating.
Spools are typically used in karts, drag racecars, some oval race cars and some road race cars. Notable road car examples on iRacing are the V8 Supercars.
Open differential
A completely open differential allows the left and right tires to rotate entirely independently. This helps with turning. The open diff also allows more torque to be transferred towards the less loaded tire. This is quite unfavorable when one tire is on a slippery surface like mud, grass, ice or wet track markings, as the tire on the slippery surface will end up spinning, consuming most of the available engine torque. Consequently, there may not be enough torque going to the tire on the grippy surface, so acceleration would suffer.
In terms of handling, an open diff gives you oversteer at the entry of a corner, and will understeer at the exit. Most open diff cars are underpowered, however, high-powered open diff cars (or cars with open limited slip differential), may spin the inside wheel on corner exit. Excessive spin on the drive axle cause that axle to lose grip causing sudden oversteer (on RWD cars) or understeer (on FWD cars).
The open diff presents challenges in low traction conditions. In addition, the balance changes suddenly through the corner, which is not desirable for a race car, as you are giving up traction. On iRacing, the Pro Mazda, Skip Barber and Spec Racer Ford are open diff cars.
Locking differential
A locking differential can behave both as an open differential and as a spool. The locker mechanism unlocks the wheels during corner entry and mid-corner and locks them on corner exit, when on the power. A popular locking differential is the Detroit Locker, used in NASCAR.
Limited slip differential
As we saw, both a spool and an open diff have their issues, especially in racing conditions. Most race cars thus use a limited slip differential, which offers the best of both worlds. You can tune the differential to behave as an open differential in certain conditions. And you can tune it to apply a certain amount of “lock” between the left and right tires. By optimizing the diff setup, you can improve your car handling through a corner.
Adjusting a limited slip differential
A limited slip differential might have any (or none) of the following adjustments available, but here’s what they do:
- Number and/or type of of friction & clutch plates: the more friction and clutch plates, the more locking happens through all corner phases.
- Preload spring: defines the base amount of force that is applied on these friction and clutch plates. With small enough (or negative) preload, you can open up your differential. The heavier the preload spring, the easier your differential will lock.
- The Ramp angle: this can be used to tune the amount of locking under deceleration/acceleration. For instance 50/80, where 50 stands for the locking during deceleration into corners, and 80 for acceleration out of corners.
Each car in iRacing has a different differential settings available, under different names and configuration values. For example, here are the differential settings for the McLaren MP-30: 
Up to you
You can achieve identical handling with completely different diff builds/configurations. As always, it’s important to experiment with each setting to gain experience with the car and to develop an instinct for how to approach differential setup. However, here’s a starting point when you think about each diff setting: